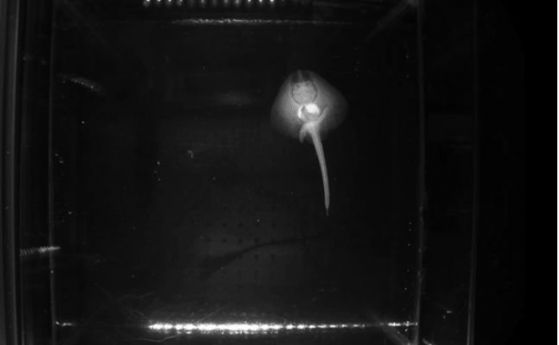


През 2018 г. малък скат, риба, подобна и с размер на тиган, предизвика голямо вълнение сред еволюционните биолози. Изследователи от Нюйоркския университет установиха, че малките скатове, които се движат по морското дъно на две перки като с крака, използват едни и същи двигателни неврони и гени, които помагат на хората и други сухоземни гръбначни животни да ходят.
Констатациите предполагат, че невронните мрежи, необходими за ходенето, може вече да са присъствали в общия прародител на скатовете и бозайниците преди около 420 милиона години - милиони години преди първата безстрашна риба да изпълзи от океана на сушата.
Но как точно са ходели нашите древни водни предци? Макар фосилите да запазват костите им, нервно-мускулната система и пътищата, които контролират движението им, се губят.
Това е мястото, където теоретичните модели могат да помогнат да се изясни обхвата и вероятността на различните стратегии.
Изследователи от Университета в Ню Йорк установиха, че малките скатове, които се придвижват по морското дъно на две перки като с крака, използват едни и същи двигателни неврони и гени, които помагат на хората и други сухоземни гръбначни животни да ходят. Кредит: Jung et al./N.Y.U. School of Medicine
Изследователи от Харвардското училище за инженерни и приложни науки Джон А. Полсън (SEAS) разработват математическа рамка, която да обясни как рибите може да са развили способността да ходят под водата. Изследователите установяват, че древните предци на скатовете и хората е възможно да са умеели да ходят ефективно под вода, използвайки наличната морфология на тялото си, с много малко енергия и с прости средства за контрол.
Древните гръбначни имали всичко необходимо, за да ходят под водата милиони години преди да излязат на сушата. Изследването е публикувано в списанието The Royal Society Interface.
В своята работа учените показват, че редуващата ляво-дясно походка е възникнала с помощта на прост алгоритъм, основан на обучение с утвърждение. В контекста на работата с изкуствен интелект, терминът „обучение с утвърждение“ (анг. Reinforcement Learning) обозначава група от методи за автоматично самообучение. Тези методи се отличават с това, че функционират без да има нужда от примерни решения на поставения проблем. Обучението протича като последователност от пробни действия, които постепенно водят до утвърждаване на подходящите действия и избягване на неподходящите.
Изследователите конструират двуног робот, за да проверят своята теория. Резултатите потвърждават предположението на учените.
Това проучване не само хвърля светлина върху миналото, но и проправя пътя за развитието на по-ефективни вдъхновени от природата роботи в бъдеще, отбелязват учените. Освен енергийно ефективното движение, учените установяват, че роботът има способността да се възстановява от сериозни увреждания.
Справка: Models of benthic bipedalism
F. Giardina and L. Mahadevan
Published:13 January 2021 https://doi.org/10.1098/rsif.2020.0701
Източник: Ancient vertebrates had everything they needed to walk underwater millions of years before the transition to dry land, Harvard John A. Paulson School of Engineering and Applied Sciences
Още по темата

Животът
Огромният геном на двойнодишащите риби изяснява как гръбначните животни са завладели сушата

Животът
Свирепа риба изскача на сушата, за да лови раци

Животът
Поне 11 вида риби може да имат способността да ходят на сушата
")

















Коментари
Моля, регистрирайте се от TУК!
Ако вече имате регистрация, натиснете ТУК!
Няма коментари към тази новина !
Последни коментари
Прост Човек
Колко бързо става квантовото вплитане? Учени го изследват в атосекунден мащаб
Прост Човек
Колко бързо става квантовото вплитане? Учени го изследват в атосекунден мащаб
Прост Човек
Последната теорема на Стивън Хокинг преобръща времето и причинността
Прост Човек
Разрязването на фотон на две създава безкраен рояк от частици