

–Я—А–µ–Ј 1868 –≥. –Х–і—Г–∞—А–і –Х–ї–Є—Б –њ—Г–±–ї–Є–Ї—Г–≤–∞–ї –µ–≤—В–Є–љ —А–Њ–Љ–∞–љ –њ–Њ–і –Ј–∞–≥–ї–∞–≤–Є–µ ,,–Я–∞—А–љ–Є—П—В —З–Њ–≤–µ–Ї –≤ –њ—А–µ—А–Є—П—В–∞вАЬ. –Т –љ–µ–≥–Њ —Б–µ –Њ–њ–Є—Б–≤–∞–ї –Њ–≥—А–Њ–Љ–µ–љ –њ–∞—А–µ–љ –і–≤–Є–≥–∞—В–µ–ї, –њ–Њ—Б—В—А–Њ–µ–љ –≤—К–≤ —Д–Њ—А–Љ–∞—В–∞ –љ–∞ —З–Њ–≤–µ—И–Ї–Њ —В—П–ї–Њ. –Ґ–Њ–≤–∞ –њ–Њ–Ј–≤–Њ–ї—П–≤–∞ –љ–∞ –Є–Ј–Њ–±—А–µ—В–∞—В–µ–ї—П, –≥–µ–љ–Є–∞–ї–љ–Є—П—В –Ф–ґ–Њ–љ –С—А–µ–є–љ—К—А–і, –і–∞ —Е–Њ–і–Є –≤ —Б–≤–Њ—П —А–Њ–±–Њ—В-–њ—А–µ–≤–Њ–Ј–љ–Њ —Б—А–µ–і—Б—В–≤–Њ, –љ–Њ—Б–µ–є–Ї–Є —Б–µ —Б—К—Б —Б–Ї–Њ—А–Њ—Б—В –Њ–Ї–Њ–ї–Њ 100 –Ї–Љ/—З, –ї–Њ–≤—Г–≤–∞–є–Ї–Є –±–Є–Ј–Њ–љ–Є –Є –њ–∞—И–µ–є–Ї–Є –Є–љ–і–Є–∞–љ—Ж–Є.
–Р –њ—А–µ–Ј 1961 –≥., –і–≤–µ –≥–Њ–і–Є–љ–Є –њ—А–µ–і–Є —Б—К–Ј–і–∞–≤–∞–љ–µ—В–Њ –љ–∞ –њ—К—А–≤–Є—П –Ї–Њ–Љ–Є–Ї—Б –Ј–∞ –Ц–µ–ї–µ–Ј–љ–Є—П —З–Њ–≤–µ–Ї, –Я–µ–љ—В–∞–≥–Њ–љ—К—В –Њ–±—П–≤–Є–ї –Ї–Њ–љ–Ї—Г—А—Б –Ј–∞ —Б—К–Ј–і–∞–≤–∞–љ–µ –љ–∞ –Є—Б—В–Є–љ—Б–Ї–Є —А–Њ–±–Њ—В–Є-—Г–љ–Є—Д–Њ—А–Љ–Є. –Р–Љ–µ—А–Є–Ї–∞–љ—Б–Ї–Є—В–µ –≤–Њ–µ–љ–љ–Є —Б–µ –љ—Г–ґ–і–∞–ї–Є –Њ—В ,,—З–Њ–≤–µ–Ї-—В–∞–љ–Ї —Б —Г—Б–Є–ї–µ–љ–Њ –Ї–Њ—А–Љ–Є–ї–љ–Њ —Г–њ—А–∞–≤–ї–µ–љ–Є–µ –Є —Б–њ–Є—А–∞—З–Ї–ЄвАЬ.
–Т –љ–∞—И–Є –і–љ–Є –њ–Њ–і –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В —Б–µ —А–∞–Ј–±–Є—А–∞ –Љ–µ—В–∞–ї–µ–љ –Ї–Њ—Б—В—О–Љ, –њ–Њ—З—В–Є —Б–ї–µ–і–≤–∞—Й —Д–Њ—А–Љ–∞—В–∞ –љ–∞ —З–Њ–≤–µ—И–Ї–Њ—В–Њ —В—П–ї–Њ, –Є–ї–Є —З–∞—Б—В –Њ—В —В–∞–Ї—К–≤ –Ї–Њ—Б—В—О–Љ —Б 2-2,5 –Љ –≤–Є—Б–Њ—З–Є–љ–∞. –Я–Њ-–≤–Є—Б–Њ–Ї–Є –Ј–∞ ,,–Љ–Њ–±–Є–ї–љ–Є—В–µ –Ї–Њ—Б—В—О–Љ–ЄвАЬ –Є –і—А—Г–≥–Є —З–Њ–≤–µ–Ї–Њ–њ–Њ–і–Њ–±–љ–Є —А–Њ–±–Њ—В–Є.
–Х–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В–Є—В–µ –≤–Є–љ–∞–≥–Є —Б–∞ –Є–Љ–∞–ї–Є –љ–∞–є-–≤–µ—З–µ –і–≤–µ –њ—А–µ–і–љ–∞–Ј–љ–∞—З–µ–љ–Є—П: —Г–≤–µ–ї–Є—З–∞–≤–∞–љ–µ –љ–∞ –і–≤–Є–≥–∞—В–µ–ї–љ–Є—В–µ —Б–њ–Њ—Б–Њ–±–љ–Њ—Б—В–Є –љ–∞ –Ј–і—А–∞–≤ —З–Њ–≤–µ–Ї –Є –љ–Њ—А–Љ–∞–ї–Є–Ј–Є—А–∞–љ–µ –љ–∞ —В–∞–Ї–Є–≤–∞ —Г –±–Њ–ї–µ–љ. –Т –Ј–∞–≤–Є—Б–Є–Љ–Њ—Б—В –Њ—В —В–Њ–≤–∞, –Ї–∞–Ї–≤–Њ —В—А—П–±–≤–∞ –і–∞ —Б–µ –њ–Њ—Б—В–Є–≥–љ–µ, –Ї–Њ–љ—Б—В—А—Г–Ї—Ж–Є—П—В–∞ –Љ–Њ–ґ–µ –і–∞ –±—К–і–µ —Б —А–∞–Ј–ї–Є—З–љ–Є –Є–Ј–Љ–µ–љ–µ–љ–Є—П. (–љ–∞–њ—А. –Њ—А—В–µ–Ј–∞ –љ–∞ —А—К–Ї–∞—В–∞ —Б—К—Й–Њ –µ –≤–Є–і –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В).
Hardiman
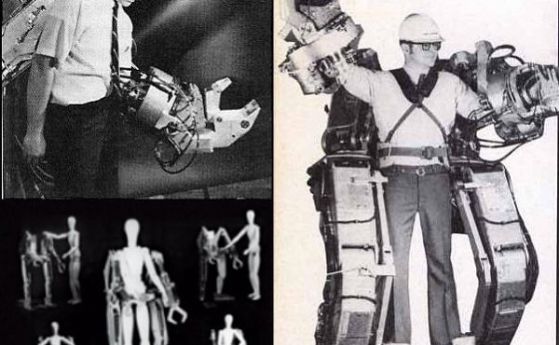
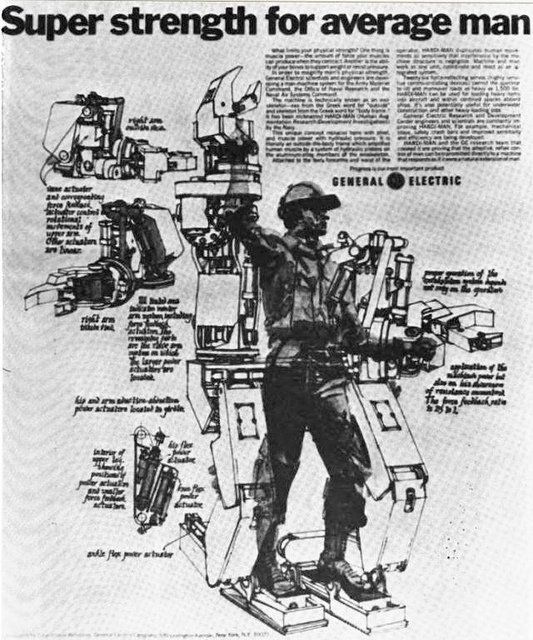
–Я—К—А–≤–Є—П—В –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В –±–Є–ї —Б—К–Ј–і–∞–і–µ–љ –њ—А–µ–Ј 1961 –≥. –Њ—В –Ї–Њ–Љ–њ–∞–љ–Є—П—В–∞ General Electric. Hardiman —В–µ–ґ–∞–ї 680 –Ї–≥, –љ–Њ –Љ–Њ–ґ–µ–ї –і–∞ –љ–Њ—Б–Є —В–µ–ґ–µ—Б—В–Є –і–Њ 340 –Ї–≥. –Ш–Љ–∞–ї–Є –љ–∞–Љ–µ—А–µ–љ–Є–µ –і–∞ –≥–Њ –Є–Ј–њ–Њ–ї–Ј–≤–∞—В –њ–Њ–і –≤–Њ–і–∞—В–∞, –≤ –Ъ–Њ—Б–Љ–Њ—Б–∞, –≤—К–≤ –≤–Њ–µ–љ–љ–Є –і–µ–є—Б—В–≤–Є—П... –љ–Њ —В–∞–Ј–Є —А–∞–Ј—А–∞–±–Њ—В–Ї–∞ –љ–µ –Њ–њ—А–∞–≤–і–∞–ї–∞ –Њ—З–∞–Ї–≤–∞–љ–Є—П—В–∞ –Є –±–Є–ї–∞ –±–ї–∞–≥–Њ–њ–Њ–ї—Г—З–љ–Њ –Ј–∞–±—А–∞–≤–µ–љ–∞. –Ю—Б–љ–Њ–≤–љ–∞—В–∞ –њ—А–Є—З–Є–љ–∞ –±–Є–ї–∞, —З–µ –њ—А–Є —В–µ–ґ–µ—Б—В 680 –Ї–≥, –љ–Њ —Б –ї–Њ—И–Њ —Ж–µ–љ—В—А–Є—А–∞–љ–µ –њ—А–Є –њ–Њ–≤–і–Є–≥–∞–љ–µ –љ–∞ —В–Њ–≤–∞—А —Ж—П–ї–∞—В–∞ –Ї–Њ–љ—Б—В—А—Г–Ї—Ж–Є—П –Ј–∞–њ–Њ—З–≤–∞–ї–∞ –і–∞ –≤–Є–±—А–Є—А–∞, –Ї–Њ–µ—В–Њ —З–µ—Б—В–Њ –і–Њ–≤–µ–ґ–і–∞–ї–Њ –і–Њ –њ—А–µ–Њ–±—А—К—Й–∞–љ–µ.
–Ф–µ–≤–µ—В –≥–Њ–і–Є–љ–Є —Б–ї–µ–і —В–Њ–≤–∞ –Ь–Є–Њ–Љ–Є—А –Т—Г–Ї–Њ–±—А–∞—В–Њ–≤–Є—З –Њ—В –С–µ–ї–≥—А–∞–і –њ–Њ–Ї–∞–Ј–∞–ї –њ—К—А–≤–Є—П —Б–Є–ї–Њ–≤ –Ї—А–∞—З–µ—Й –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В, –Ј–∞–і–∞—З–∞—В–∞ –љ–∞ –Ї–Њ–є—В–Њ –±–Є–ї–∞ –і–∞ –і–∞–≤–∞ –њ—К–ї–љ–Њ—Ж–µ–љ–љ–Є –і–≤–Є–≥–∞—В–µ–ї–љ–Є –≤—К–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є –љ–∞ —Е–Њ—А–∞ —Б –њ–∞—А–∞–ї–Є—З –љ–∞ –і–Њ–ї–љ–Є—В–µ –Ї—А–∞–є–љ–Є—Ж–Є. –Т –Њ—Б–љ–Њ–≤–∞—В–∞ –љ–∞ –Ј–∞–і–≤–Є–ґ–≤–∞—Й–Є—П –Љ–µ—Е–∞–љ–Є–Ј—К–Љ –±–Є–ї–∞ –њ–љ–µ–≤–Љ–∞—В–Є–Ї–∞—В–∞. –†–∞–Ј—А–∞–±–Њ—В–Ї–∞—В–∞ –±–Є–ї–∞ –Ј–∞–±–µ–ї—П–Ј–∞–љ–∞ –Њ—В —Б—К–≤–µ—В—Б–Ї–Є —Г—З–µ–љ–Є, –Ї–Њ–Є—В–Њ –Ј–∞–µ–і–љ–Њ —Б—К—Б —Б–≤–Њ–Є —О–≥–Њ—Б–ї–∞–≤—Б–Ї–Є –Ї–Њ–ї–µ–≥–Є –Ј–∞–њ–Њ—З–љ–∞–ї–Є —Б—К–≤–Љ–µ—Б—В–љ–∞ —А–∞–±–Њ—В–∞ –њ–Њ —Г—Б—К–≤—К—А—И–µ–љ—Б—В–≤–∞–љ–µ –љ–∞ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В —Б –њ–Њ–і–Њ–±–љ–Њ –Ј–∞–і–≤–Є–ґ–≤–∞–љ–µ. –Э–Њ —Б –Є–і–≤–∞–љ–µ—В–Њ –љ–∞ –њ–µ—А–µ—Б—В—А–Њ–є–Ї–∞—В–∞ –њ—А–Њ–µ–Ї—В—К—В –±–Є–ї –Ј–∞–Ї—А–Є—В, –∞ –љ—П–Љ–∞ –Є –і–∞–љ–љ–Є –Ј–∞ —В–∞–є–љ–Є ,,–њ–Њ–і–Ј–µ–Љ–љ–ЄвАЬ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В–љ–Є —А–∞–Ј—А–∞–±–Њ—В–Ї–Є.
–Т —А–∞–Ј–ї–Є—З–љ–Є —Б—В—А–∞–љ–Є –Є–Ј–Њ–±—А–µ—В–∞—В–µ–ї–Є —Б–µ –Њ–њ–Є—В–≤–∞–ї–Є –і–∞ —Б—К–Ј–і–∞–і–∞—В ,,–≤—К–љ—И–љ–Є —В–µ–ї–∞вАЬ —Б –љ–∞–є-—А–∞–Ј–ї–Є—З–љ–Њ –њ—А–µ–і–љ–∞–Ј–љ–∞—З–µ–љ–Є–µ, –љ–Њ –њ–Њ—А–∞–і–Є –Љ–љ–Њ–≥–Њ –њ—А–µ–њ—П—В—Б—В–≤–Є—П (–Ј–∞ –Ї–Њ–Є—В–Њ —Й–µ —Б—В–∞–љ–µ –і—Г–Љ–∞ –њ–Њ-–і–Њ–ї—Г) –љ–µ –њ–Њ—Б—В–Є–≥–љ–∞–ї–Є —Г—Б–њ–µ—Е. –Э–µ–і–Њ—Б—В–Є–≥ –љ–∞ –µ–љ–µ—А–≥–Њ–љ–Њ—Б–Є—В–µ–ї–Є, –±–∞–≤–µ–љ —А—К—Б—В –љ–∞ –љ–∞—Г—З–љ–Њ-—В–µ—Е–љ–Є—З–µ—Б–Ї–Є—П –њ—А–Њ–≥—А–µ—Б, –љ–µ–Ј–∞–і–Њ–≤–Њ–ї–Є—В–µ–ї–љ–Њ—В–Њ —А–∞–Ј–≤–Є—В–Є–µ –љ–∞ –Љ–∞—В–µ—А–Є–∞–ї–Њ–Ј–љ–∞–љ–Є–µ—В–Њ –Є —Б—А–Њ–і–љ–Є—В–µ –Љ—Г –љ–∞—Г–Ї–Є, –∞ —Б—К—Й–Њ —В–∞–Ї–∞ –Є –љ–∞ –µ–ї–µ–Ї—В—А–Њ–љ–љ–Є—В–µ –Є–Ј—З–Є—Б–ї–µ–љ–Є—П –Є –Ї–Є–±–µ—А–љ–µ—В–Є–Ї–∞—В–∞ вАУ –≤—Б–Є—З–Ї–Њ —В–Њ–≤–∞ –±–Є–ї–Њ —З–∞—Б—В –Њ—В –њ—А–Є—З–Є–љ–Є—В–µ. –°—В–∞–≤–∞–ї–Њ –і—Г–Љ–∞ –Ј–∞ —Б–ї–Њ–ґ–љ–Є —В–µ—Е–љ–Њ–ї–Њ–≥–Є–Є, –Ї–Њ–Є—В–Њ –µ–і–≤–∞ —Б–µ–≥–∞ —Б–µ —Г—Б–≤–Њ—П–≤–∞—В –њ—К–ї–љ–Њ—Ж–µ–љ–љ–Њ –Њ—В —Е–Њ—А–∞—В–∞.
–Я—А–Њ–±–ї–µ–Љ–Є –љ–∞ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В–Є—В–µ
–Э–∞ –њ—А—К–≤ –њ–Њ–≥–ї–µ–і –Љ–∞—В–µ—А–Є–∞–ї–Є—В–µ –љ–∞ –Ч–µ–Љ—П—В–∞ —Б–∞ –Љ–љ–Њ–≥–Њ, –љ–Њ –≤ –і–µ–є—Б—В–≤–Є—В–µ–ї–љ–Њ—Б—В –љ–µ —Б–∞ —В–Њ–ї–Ї–Њ–≤–∞ –Љ–љ–Њ–≥–Њ —В–µ–Ј–Є, –Њ—В –Ї–Њ–Є—В–Њ –Љ–Њ–ґ–µ –і–∞ —Б–µ –Є–Ј—А–∞–±–Њ—В–Є –µ–і–љ–Њ –Ј–і—А–∞–≤–Њ —В—П–ї–Њ, –Ї–Њ–µ—В–Њ –і–∞ –µ –Є –і–Њ—Б—В–∞—В—К—З–љ–Њ –ї–µ–Ї–Њ, –Ј–∞ –і–∞ –љ–µ —Б–µ –љ—Г–ґ–і–∞–µ –Њ—В —Б–Њ–±—Б—В–≤–µ–љ–∞ —В—П–≥–∞.
–Р–Ї–Њ —Е–Є–њ–Њ—В–µ—В–Є—З–љ–Є—П—В –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В —Б–µ —А–∞–Ј–ї–Њ–ґ–Є –љ–∞ —Б—К—Б—В–∞–≤–љ–Є —З–∞—Б—В–Є, —В–Њ–є —Й–µ —Б–µ —Б—К—Б—В–Њ–Є –Њ—В –Є–Ј—В–Њ—З–љ–Є–Ї –љ–∞ –Ј–∞—Е—А–∞–љ–≤–∞–љ–µ, —Б–Њ—Д—В—Г–µ—А (–Я–Ю) –Є –Љ–µ—Е–∞–љ–Є—З–µ—Б–Ї–∞ —З–∞—Б—В, –љ–∞–њ–Њ–і–Њ–±—П–≤–∞—Й–∞ –Њ—В—З–∞—Б—В–Є –њ—А–Є—А–Њ–і–љ–∞—В–∞ вАУ –Ї–Њ—Б—В–Є, —Б—В–∞–≤–Є –Є —В.–љ. –Ш –∞–Ї–Њ —Б –Љ–µ—Е–∞–љ–Є–Ї–∞—В–∞ –Є —Б–Њ—Д—В—Г–µ—А–∞ –Њ–њ–Њ—А–љ–Є—В–µ —В–Њ—З–Ї–Є —Б–∞ —П—Б–љ–Є –Є –њ—А–Њ–±–ї–µ–Љ–Є –Ј–∞ —А–µ—И–∞–≤–∞–љ–µ –њ–Њ—З—В–Є –љ–µ —Б–∞ –Њ—Б—В–∞–љ–∞–ї–Є, —В–Њ —Б—К—Б –Ј–∞—Е—А–∞–љ–≤–∞–љ–µ—В–Њ –љ–µ –µ —В–∞–Ї–∞. –Р–Ї–Њ —Б—К—Й–µ—Б—В–≤—Г–≤–∞ –љ–∞–і–µ–ґ–і–µ–љ –Ј–∞—Е—А–∞–љ–≤–∞—Й –Є–Ј—В–Њ—З–љ–Є–Ї, –±–Є –Љ–Њ–≥–ї–Њ –і–∞ —Б–µ —Б—К–Ј–і–∞–і–µ –љ–∞ –њ—А–Њ—Б—В–Њ –Њ–±–Є–Ї–љ–Њ–≤–µ–љ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В, –∞ –і–∞ —Б–µ –Њ–±–µ–і–Є–љ–Є —Б—К—Б —Б–Ї–∞—Д–∞–љ–і—К—А –Є —А–∞–љ–Є—Ж–∞ —Б –≥–Њ—А–Є–≤–Њ.
–Т—Б–µ–Ї–Є –Њ—В —А–∞–Ј–њ—А–Њ—Б—В—А–∞–љ–µ–љ–Є—В–µ –Ї–Њ–Љ–њ–∞–Ї—В–љ–Є –Ј–∞—Е—А–∞–љ–≤–∞—Й–Є –Є–Ј—В–Њ—З–љ–Є—Ж–Є (–∞–Ї—Г–Љ—Г–ї–∞—В–Њ—А–љ–Є –±–∞—В–µ—А–Є–Є) –≤ –і–љ–µ—И–љ–Њ –≤—А–µ–Љ–µ –±–Є –Љ–Њ–≥—К–ї –і–∞ –Њ—Б–Є–≥—Г—А–Є –љ–∞ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В–Є—В–µ —Б–њ–Њ–Ї–Њ–є–љ–Є –љ—П–Ї–Њ–ї–Ї–Њ —З–∞—Б–∞ —А–∞–±–Њ—В–∞ –Ф–≤–Є–≥–∞—В–µ–ї—П—В —Б –≤—К—В—А–µ—И–љ–Њ –≥–Њ—А–µ–љ–µ –Є–Ј–≥–ї–µ–ґ–і–∞ –љ–∞–і–µ–ґ–і–µ–љ, –љ–Њ –љ–µ –µ –Њ—Б–Њ–±–µ–љ–Њ –Ї–Њ–Љ–њ–∞–Ї—В–µ–љ. –Ю—Б–≤–µ–љ —В–Њ–≤–∞, –Љ—Г –µ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–∞ –і–Њ–њ—К–ї–љ–Є—В–µ–ї–љ–∞ —Б–Є—Б—В–µ–Љ–∞ –Ј–∞ –Њ—Е–ї–∞–ґ–і–∞–љ–µ, –∞ –Є —Б–∞–Љ–Є—П—В –Ф–Т–У –µ —В—А—Г–і–љ–Њ –і–∞ —Б–µ –љ–∞—Б—В—А–Њ–Є –Љ–Њ–Љ–µ–љ—В–∞–ї–љ–Њ –і–∞ –Ј–∞–і–µ–є—Б—В–≤–∞ –≥–Њ–ї—П–Љ–Њ –Ї–Њ–ї–Є—З–µ—Б—В–≤–Њ –µ–љ–µ—А–≥–Є—П. –Х–ї–µ–Ї—В—А–Њ—Е–Є–Љ–Є—З–µ—Б–Ї–Є—В–µ –≥–Њ—А–Є–≤–∞ –Љ–Њ–≥–∞—В –і–∞ –њ–Њ–Љ–Њ–≥–љ–∞—В (–Љ–µ—В–∞–љ–Њ–ї) –Њ—В–≥–Њ–≤–∞—А—П—В –љ–∞ —В–Њ–≤–∞ —Г—Б–ї–Њ–≤–Є–µ, –љ–Њ –Є —А–∞–±–Њ—В—П—В –њ—А–Є –њ—А–µ–Ї–Њ–Љ–µ—А–љ–Њ –≤–Є—Б–Њ–Ї–Є —В–µ–Љ–њ–µ—А–∞—В—Г—А–Є. –Э–∞–њ—А–Є–Љ–µ—А 600 –≥—А–∞–і—Г—Б–∞ –¶–µ–ї–Ј–Є–є –µ –Њ—В–љ–Њ—Б–Є—В–µ–ї–љ–Њ –љ–Є—Б–Ї–∞ —В–µ–Љ–њ–µ—А–∞—В—Г—А–∞ –Ј–∞ —В–∞–Ї—К–≤ –і–≤–Є–≥–∞—В–µ–ї.
–Э–∞ –њ—А–∞–Ї—В–Є–Ї–∞ –љ–∞–є-–≤—К–Ј–Љ–Њ–ґ–љ–Њ—В–Њ —А–µ—И–µ–љ–Є–µ –љ–∞ –њ—А–Њ–±–ї–µ–Љ–∞ —Б –і–≤–Є–≥–∞—В–µ–ї—П –љ–∞ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В–∞ –Љ–Њ–ґ–µ –і–∞ —Б—В–∞–љ–µ –µ–і–Є–љ —Б—К—Й–Њ —В–∞–Ї–∞ —В—А—Г–і–µ–љ –Ј–∞ —А–µ—И–∞–≤–∞–љ–µ –≤—К–њ—А–Њ—Б вАУ —В–Њ–Ј–Є –Ј–∞ –±–µ–Ј–ґ–Є—З–љ–Њ—В–Њ –њ—А–µ–і–∞–≤–∞–љ–µ –љ–∞ –µ–љ–µ—А–≥–Є—П. –Т—Б–µ –њ–∞–Ї —В—П –Љ–Њ–ґ–µ –і–∞ –±—К–і–µ –њ—А–µ–і–∞–≤–∞–љ–∞ –Њ—В –±–µ–Ј –Ј–љ–∞—З–µ–љ–Є–µ –Ї–Њ–ї–Ї–Њ –≥–Њ–ї—П–Љ —А–µ–∞–Ї—В–Њ—А (–і–Њ—А–Є –Є —П–і—А–µ–љ!). –Э–Њ –Ї–∞–Ї?
–Ь–µ—Е–∞–љ–Є–Ї–∞ –љ–∞ –њ–∞—Б–Є–≤–љ–Є—П –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В
–Ъ–∞–Ї—В–Њ –µ –Є —Г —З–Њ–≤–µ–Ї–∞, –≤—Б–µ–Ї–Є –Ї—А–∞–Ї –љ–∞ –Љ–µ—Е–∞–љ–Є–Ј–Љ–∞ —Б–µ —Б—К—Б—В–Њ–Є –Њ—В –±–µ–і—А–∞, –њ–Є—Й—П–ї–Є –Є —Б—В—К–њ–∞–ї–Њ. –І–∞—Б—В–Є—В–µ –љ–∞ –Ї–Њ–љ—Б—В—А—Г–Ї—Ж–Є—П—В–∞ —Б–µ —Б—К–µ–і–Є–љ—П–≤–∞—В —З—А–µ–Ј —И–∞—А–љ–Є—А–Є —Б —А–∞–Ј–ї–Є—З–љ–∞ —Б—В–µ–њ–µ–љ –љ–∞ –њ–Њ–і–≤–Є–ґ–љ–Њ—Б—В. –®–∞—А–љ–Є—А–љ–Њ —Б—К–µ–і–Є–љ–µ–љ–Њ—В–Њ —Б –Ї–Њ—А–њ—Г—Б–∞ –±–µ–і—А–Њ –Є–Љ–∞ —В—А–Є —Б—В–µ–њ–µ–љ–Є –љ–∞ –њ–Њ–і–≤–Є–ґ–љ–Њ—Б—В. –Ґ–Њ –Љ–Њ–ґ–µ –і–∞ —Б–µ –≤—К—А—В–Є –Њ–Ї–Њ–ї–Њ —Е–Њ—А–Є–Ј–Њ–љ—В–∞–ї–љ–∞ –Њ—Б ,,–љ–∞–њ—А–µ–і-–љ–∞–Ј–∞–івАЬ (–Њ–±–Є–Ї–љ–Њ–≤–µ–љ–Њ –≤ –љ—П–Ї–∞–Ї–≤–Є –≥—А–∞–љ–Є—Ж–Є), –∞ –њ–Њ –і—А—Г–≥–∞ —Е–Њ—А–Є–Ј–Њ–љ—В–∞–ї–љ–∞ –Њ—Б —Б–µ –Њ—Б—К—Й–µ—Б—В–≤—Г–≤–∞ –љ–∞–≤–µ–ґ–і–∞–љ–µ –Є –њ–Њ–≤–і–Є–≥–∞–љ–µ. –°—К—Й–Њ —В–∞–Ї–∞ –Љ–Њ–ґ–µ –і–∞ —Б–µ –≤—К—А—В–Є –Є –Њ–Ї–Њ–ї–Њ –≤–µ—А—В–Є–Ї–∞–ї–љ–∞ –Њ—Б. –Я–Є—Й—П–ї—К—В —Б–µ —Б—К–µ–і–Є–љ—П–≤–∞ —Б –±–µ–і—А–Њ—В–Њ —З—А–µ–Ј —Ж–Є–ї–Є–љ–і—А–Є—З–µ–љ —И–∞—А–љ–Є—А —Б –µ–і–љ–∞ –Њ—Б –љ–∞ –≤—К—А—В–µ–љ–µ вАУ —Е–Њ—А–Є–Ј–Њ–љ—В–∞–ї–љ–∞. –Я–Њ –Њ—В–љ–Њ—И–µ–љ–Є–µ –љ–∞ –њ–Є—Й—П–ї–∞ —В–Њ –Є–Љ–∞ —В—А–Є —Б—В–µ–њ–µ–љ–Є –љ–∞ —Б–≤–Њ–±–Њ–і–∞ –Є –њ–Њ –≤—Б—П–Ї–∞ –Љ–Њ–ґ–µ –і–∞ —Б–µ –≤—К—А—В–Є –Њ–Ї–Њ–ї–Њ –њ–Є—Й—П–ї–∞ –≤ –Њ–њ—А–µ–і–µ–ї–µ–љ–Є –≥—А–∞–љ–Є—Ж–Є. –°—К—Й–Њ –Ї–∞–Ї—В–Њ —Е–Њ–і–µ–љ–µ—В–Њ –љ–∞ ,,–≥–Њ–ї–Є—ПвАЬ —З–Њ–≤–µ–Ї, —В–∞–Ї–∞ –Є —В–Њ–≤–∞ –љ–∞ –Њ–±–ї–µ—З–µ–љ–Є—П –≤ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В –њ—А–µ–і—Б—В–∞–≤–ї—П–≤–∞ –њ–Њ—Б–ї–µ–і–Њ–≤–∞—В–µ–ї–љ–Њ—Б—В –љ–∞ —А–µ–і—Г–≤–∞—Й–Є —Б–µ –µ–і–љ–Њ–Њ–њ–Њ—А–љ–Є –Є –і–≤—Г–Њ–њ–Њ—А–љ–Є —Д–∞–Ј–Є. –Т –њ—К—А–≤–∞—В–∞ —Д–∞–Ј–∞ –µ–і–Є–љ–Є—П—В –Ї—А–∞–Ї —Б–µ –љ–∞–Љ–Є—А–∞ –љ–∞ —В–≤—К—А–і–∞ –Њ–њ–Њ—А–∞, –∞ –і—А—Г–≥–Є—П—В —Б–µ –њ—А–µ–Љ–µ—Б—В–≤–∞ (–љ–∞—А–Є—З–∞ —Б–µ –Њ—Й–µ —Д–∞–Ј–∞ –љ–∞ –њ—А–µ–љ–Њ—Б–∞) –Є –≤ –љ–µ—П –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В—К—В –Є–Љ–∞ 14 —Б—В–µ–њ–µ–љ–Є –љ–∞ —Б–≤–Њ–±–Њ–і–∞.
–Я–∞—Б–Є–≤–љ–Є—П—В –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В –љ–µ —Б—К–і—К—А–ґ–∞ –љ–Є–Ї–∞–Ї–≤–Є –Ј–∞—Е—А–∞–љ–≤–∞—Й–Є –Є–Ј—В–Њ—З–љ–Є—Ж–Є, –Ї–Њ–Є—В–Њ –Њ—В–≤—А–µ–Љ–µ-–љ–∞–≤—А–µ–Љ–µ –±–Є—Е–∞ —Б–µ –љ—Г–ґ–і–∞–ї–Є –Њ—В –њ—А–µ–Ј–∞—А–µ–ґ–і–∞–љ–µ. –Т—А–µ–Љ–µ—В–Њ –Љ—Г –љ–∞ —А–∞–±–Њ—В–∞ –µ –љ–µ–Њ–≥—А–∞–љ–Є—З–µ–љ–Њ. –Ю—В –і—А—Г–≥–∞ —Б—В—А–∞–љ–∞, –Њ—В—Б—К—Б—В–≤–Є–µ—В–Њ –љ–∞ –і–Њ–њ—К–ї–љ–Є—В–µ–ї–љ–Њ –Ј–∞—Е—А–∞–љ–≤–∞–љ–µ –њ–Њ–љ–Є–ґ–∞–≤–∞ –≤—К–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є—В–µ –љ–∞ –Ї–Њ–љ—Б—В—А—Г–Ї—Ж–Є—П—В–∞ –Є —И–Є—А–Њ—В–∞—В–∞ –љ–∞ –Ј–∞–і–∞—З–Є—В–µ, –Ї–Њ–Є—В–Њ –Љ–Њ–ґ–µ –і–∞ –Є–Ј–њ—К–ї–љ—П–≤–∞.

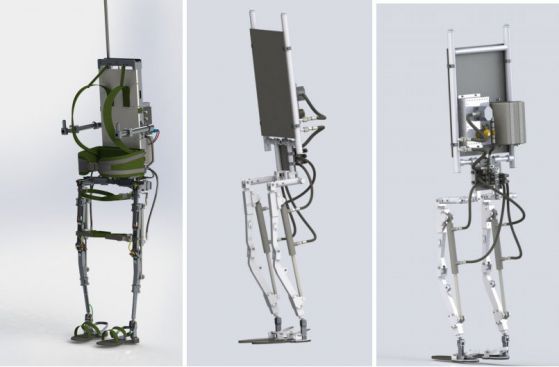
3D –Љ–Њ–і–µ–ї –љ–∞ –њ–∞—Б–Є–≤–µ–љ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В
–Р–ї–≥–Њ—А–Є—В—К–Љ—К—В –љ–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є–µ –љ–∞ –њ–∞—Б–Є–≤–љ–Є—П –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В —Б–µ —Б—К—Б—В–Њ–Є –≤ –Ј–∞–Ї–ї—О—З–≤–∞–љ–µ –Є –Њ—Б–≤–Њ–±–Њ–ґ–і–∞–≤–∞–љ–µ –љ–∞ –Ї–Њ–ї—П–љ–Њ–≤–Є—В–µ —Б—В–∞–≤–Є –њ–Њ—А–µ–і вАУ –њ—К—А–≤–Њ –µ–і–Є–љ–Є—П, –њ–Њ—Б–ї–µ –Є –і—А—Г–≥–Є—П –Ї—А–∞–Ї. –Т –Љ–Њ–Љ–µ–љ—В–∞ –љ–∞ –њ–Њ—Б—В–∞–≤—П–љ–µ –љ–∞ –µ–і–Є–љ–Є—П –Ї—А–∞–Ї –љ–∞ —В–≤—К—А–і–∞ –њ–Њ–≤—К—А—Е–љ–Њ—Б—В –Ї–Њ–ї—П–љ–Њ–≤–Є—П—В–∞ –Љ—Г —Б—В–∞–≤–∞ —Б–µ —Д–Є–Ї—Б–Є—А–∞, —В–Њ–є —Б–µ –±–ї–Њ–Ї–Є—А–∞ –Є –Ј–∞ –Є–Ј–≤–µ—Б—В–љ–Њ –≤—А–µ–Љ–µ —К–≥—К–ї—К—В –љ–∞ —Б—В–∞–≤–∞—В–∞ —Б–њ–Є—А–∞ –Є–Ј–Љ–µ–љ–µ–љ–Є–µ—В–Њ —Б–Є. –§–Є–Ї—Б–Є—А–∞–љ–µ—В–Њ —Б—В–∞–≤–∞ —З—А–µ–Ј —Б–њ–Є—А–∞—З–µ–љ –Љ–µ—Е–∞–љ–Є–Ј—К–Љ, –Љ–Њ–љ—В–Є—А–∞–љ –≤ –Ї–Њ–ї—П–љ–Њ–≤–∞—В–∞ —Б—В–∞–≤–∞. –Ґ—К–є –Ї–∞—В–Њ –≤ —В–Њ–≤–∞ –њ–Њ–ї–Њ–ґ–µ–љ–Є–µ —Б—В–∞–≤–∞—В–∞ –љ–µ –Љ–Њ–ґ–µ –≤–µ—З–µ –і–∞ —Б–µ —Б–≤–Є–≤–∞, —Ж—П–ї–Њ—В–Њ –љ–∞—В–Њ–≤–∞—А–≤–∞–љ–µ —Б–µ –њ–Њ–µ–Љ–∞ –Њ—В —Б–њ–Є—А–∞—З–љ–Њ—В–Њ —Г—Б—В—А–Њ–є—Б—В–≤–Њ. –Т –Љ–Њ–Љ–µ–љ—В–∞ –љ–∞ –Њ—В–ї–µ–њ—П–љ–µ –љ–∞ –Ї—А–∞–Ї–∞ –Њ—В –њ–Њ–≤—К—А—Е–љ–Њ—Б—В—В–∞ —Б—В–∞–≤–∞—В–∞ —Б–µ –Њ—Б–≤–Њ–±–Њ–ґ–і–∞–≤–∞ –Є –Ї—А–∞–Ї—К—В –љ–∞ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В–∞ –Њ—В–љ–Њ–≤–Њ —Б–ї–µ–і–≤–∞ –Љ—Г—Б–Ї—Г–ї–љ–Є—В–µ –Ї–Њ–Љ–∞–љ–і–Є –љ–∞ —З–Њ–≤–µ—И–Ї–Є—П –Ї—А–∞–Ї. –Р–Ї–Њ —З–Њ–≤–µ–Ї —Б—В–Њ–Є –љ–∞ –µ–і–љ–Њ –Љ—П—Б—В–Њ –Є –љ–µ —Б–µ –њ–Њ–Љ—А—К–і–≤–∞, —В–Њ —Б—В–∞–≤–Є—В–µ —Б–∞ –Ј–∞–Ї–ї—О—З–µ–љ–Є –Є –±–ї–∞–≥–Њ–і–∞—А–µ–љ–Є–µ –љ–∞ —В–Њ–≤–∞ –Ї–Њ–ї–µ–љ–∞—В–∞ –њ–Њ–љ–∞—Б—П—В —В–µ–ґ–µ—Б—В—В–∞ –Є –љ–µ –Љ–Њ–≥–∞—В –і–∞ —Б–µ –њ—А–µ–≥—К–љ–∞—В. –Я–Њ —В–Њ–Ј–Є –љ–∞—З–Є–љ –Љ–µ—Е–∞–љ–Є–Ј–Љ—К—В –љ–∞–њ—К–ї–љ–Њ –Њ—Б–≤–Њ–±–Њ–ґ–і–∞–≤–∞ —З–Њ–≤–µ–Ї–∞ –Њ—В —В–µ–≥–ї–Њ—В–Њ –Љ—Г вАУ –і–Њ—А–Є –Є –Њ—В —Б–Њ–±—Б—В–≤–µ–љ–Њ—В–Њ –Љ—Г, –Ј–∞—Й–Њ—В–Њ —В–Њ —Б–µ –љ–Њ—Б–Є –Њ—В –Љ–µ—Е–∞–љ–Є–Ј–Љ–∞. –Х—В–Њ –Ј–∞—Й–Њ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В—К—В –µ –њ–Њ–ї–µ–Ј–µ–љ –њ—А–Є –љ–Њ—Б–µ–љ–µ –љ–∞ —В–µ–ґ–Ї–Є —В–Њ–≤–∞—А–Є –Є–ї–Є –Ї–∞—З–≤–∞–љ–µ –њ–Њ —Б—В—К–ї–±–∞ вАУ —З–Њ–≤–µ–Ї –Љ–Њ–ґ–µ –≤ –њ—А–Њ–Є–Ј–≤–Њ–ї–µ–љ –Љ–Њ–Љ–µ–љ—В –і–∞ —Б–њ—А–µ –Є –і–∞ –њ–Њ—З–Є–љ–µ.
–Ю–њ–Є—Б–∞–љ–Є—П—В –њ–Њ-–≥–Њ—А–µ –Љ–µ—В–Њ–і –љ–∞ —Д–Є–Ї—Б–∞—Ж–Є—П —Б–µ –Є–Ј–њ–Њ–ї–Ј–≤–∞ –Є –њ—А–Є –њ—А–Њ—В–µ–Ј–Є—А–∞–љ–µ –љ–∞ –Є–љ–≤–∞–ї–Є–і–Є, –Ј–∞–≥—Г–±–Є–ї–Є –Ї—А–∞–Ї–∞ —Б–Є –њ–Њ–і –Ї–Њ–ї—П–љ–Њ—В–Њ. –Ґ–∞–Ї–∞–≤–∞ –њ—А–Њ—В–µ–Ј—П —Б—К–і—К—А–ґ–∞ –Ї–Њ–ї—П–љ–Њ–≤–∞ —Б—В–∞–≤–∞.

–І–Њ–≤–µ–Ї –≤ –њ–∞—Б–Є–≤–µ–љ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В –љ–Њ—Б–Є —В–µ–ґ–µ—Б—В –Њ–Ї–Њ–ї–Њ 100 –Ї–≥
–†–µ—И–µ–љ–Є–µ—В–Њ –љ–∞ –њ—А–Њ–±–ї–µ–Љ–∞ –Ј–∞ —А–∞–≤–љ–Њ–≤–µ—Б–Є–µ—В–Њ –љ–∞ —З–Њ–≤–µ–Ї –≤ —В–∞–Ї—К–≤ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В –Њ—Б—В–∞–≤–∞ –≤ —А—К—Ж–µ—В–µ –љ–∞ —Б–∞–Љ–Є—П –Љ—Г –њ–Њ—В—А–µ–±–Є—В–µ–ї. –Р–Ї–Њ —З–Њ–≤–µ–Ї, –љ–∞–њ—А–Є–Љ–µ—А, –Є–Љ–∞ –љ–∞–Љ–µ—А–µ–љ–Є–µ –і–∞ –љ–Њ—Б–Є —В–µ–ґ—К–Ї —В–Њ–≤–∞—А —Б –њ–Њ–Љ–Њ—Й—В–∞ –љ–∞ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В, –Њ–±–Є–Ї–љ–Њ–≤–µ–љ–Њ —Б–µ –њ—А–µ–њ–Њ—А—К—З–≤–∞ —В–Њ–є –њ—А–µ–і–≤–∞—А–Є—В–µ–ї–љ–Њ –і–∞ —В—А–µ–љ–Є—А–∞.
–Ь–µ—Е–∞–љ–Є–Ї–∞ –љ–∞ –∞–Ї—В–Є–≤–љ–Є—П –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В
–Р–Ї—В–Є–≤–љ–Є—П—В –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В –Њ–±–Є–Ї–љ–Њ–≤–µ–љ–Њ —Б–µ –Њ—В —Б–µ–і–µ–Љ —И–∞—А–љ–Є—А–љ–Њ —Б—К–µ–і–Є–љ–µ–љ–Є –Ј–≤–µ–љ–∞ –Є –µ —Б–љ–∞–±–і–µ–љ —Б –і–≤–∞ —Е–Є–і—А–∞–≤–ї–Є—З–љ–Є —Ж–Є–ї–Є–љ–і—К—А–∞, –Ї–Њ–Є—В–Њ —Б–≥—К–≤–∞—В –Є —А–∞–Ј–≤–Є–≤–∞—В –Ї–Њ–ї—П–љ–Њ–≤–Є—В–µ —Б—В–∞–≤–Є –Є —Б–Є—Б—В–µ–Љ–∞—В–∞ –Ј–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є–µ.
–°–Є—Б—В–µ–Љ–∞—В–∞ ,,—З–Њ–≤–µ–Ї-–µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—ВвАЬ –µ –њ–Њ–і–Њ–±–љ–∞ –љ–∞ —Б–Є—Б—В–µ–Љ–∞—В–∞ ,,–њ–Є–ї–Њ—В-—Б–∞–Љ–Њ–ї–µ—ВвАЬ –Є–ї–Є ,,—И–Њ—Д—М–Њ—А-–∞–≤—В–Њ–Љ–Њ–±–Є–ївАЬ. –Т —В—П—Е –Є–Љ–∞ —А–∞–Ј–њ—А–µ–і–µ–ї–µ–љ–Є–µ –љ–∞ —Д—Г–љ–Ї—Ж–Є–Є—В–µ –Љ–µ–ґ–і—Г —З–Њ–≤–µ–Ї–∞-–Њ–њ–µ—А–∞—В–Њ—А –Є –Љ–µ—Е–∞–љ–Є–Ј–Љ–∞. –Т —А–∞–Ј–≥–ї–µ–ґ–і–∞–љ–∞—В–∞ —В—Г–Ї —Б–Є—Б—В–µ–Љ–∞ –њ—А–µ–і–∞–≤–Ї–Є—В–µ –љ–∞ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В–∞ —В—А—П–±–≤–∞ –і–∞ –Є–Ј–њ—К–ї–љ—П–≤–∞—В –≤–Њ–ї—П—В–∞ –љ–∞ –Њ–њ–µ—А–∞—В–Њ—А–∞. –Ґ—П —Б–µ ,,—Б—К–Њ–±—Й–∞–≤–∞вАЬ, –Ї–∞–Ї—В–Њ —Й–µ –≤–Є–і–Є–Љ –Є –њ–Њ-–љ–∞–і–Њ–ї—Г, —Б –њ–Њ–Љ–Њ—Й—В–∞ –љ–∞ –і–∞—В—З–Є—Ж–Є.
3D –Љ–Њ–і–µ–ї –љ–∞ –∞–Ї—В–Є–≤–µ–љ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В
–Ъ–∞–Ї—В–Њ –Є –њ—А–Є –њ–∞—Б–Є–≤–љ–Є—П –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В, –Є –њ—А–Є –∞–Ї—В–Є–≤–љ–Є—П –њ–∞–Ј–µ–љ–µ—В–Њ –љ–∞ —А–∞–≤–љ–Њ–≤–µ—Б–Є–µ –µ –≥—А–Є–ґ–∞ –љ–∞ —З–Њ–≤–µ–Ї–∞ –Є –љ–µ–≥–Њ–≤–Є—В–µ –Љ—Г—Б–Ї—Г–ї–Є, –∞ –љ–µ –њ—А–µ–і–∞–≤–Ї–Є—В–µ –љ–∞ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В–∞.
–Ь–∞—В–µ—А–Є–∞–ї
–Я—К—А–≤–Є—В–µ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В–Є –±–Є–ї–Є –Є–Ј—А–∞–±–Њ—В–µ–љ–Є –Њ—В –∞–ї—Г–Љ–Є–љ–Є–є –Є —Б—В–Њ–Љ–∞–љ–∞, –љ–µ—Б–Ї—К–њ–Є –Є –њ—А–Њ—Б—В–Є –Ј–∞ –Є–Ј–њ–Њ–ї–Ј–≤–∞–љ–µ. –Э–Њ —Б—В–Њ–Љ–∞–љ–∞—В–∞ –µ –њ—А–µ–Ї–∞–ї–µ–љ–Њ —В–µ–ґ–Ї–∞, –∞ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В—К—В —В—А—П–±–≤–∞ –і–∞ –Љ–Њ–ґ–µ –і–∞ –љ–Њ—Б–Є —В–Њ–≤–∞—А –Є –љ–∞–і —Б–≤–Њ–µ—В–Њ —Б–Њ–±—Б—В–≤–µ–љ–Њ —В–µ–≥–ї–Њ. –Ґ–Њ–µ—Б—В, –њ—А–Є –≥–Њ–ї—П–Љ–Њ —В–µ–≥–ї–Њ –µ—Д–µ–Ї—В–Є–≤–љ–Њ—Б—В—В–∞ –љ–∞ ,,–Ї–Њ—Б—В—О–Љ–∞вАЬ –њ–∞–і–∞. –Р–ї—Г–Љ–Є–љ–Є–µ–≤–Є—В–µ —Б–њ–ї–∞–≤–Є —Б–∞ –і–Њ—Б—В–∞—В—К—З–љ–Њ –ї–µ–Ї–Є, –љ–Њ –±—К—А–Ј–Њ –љ–∞—В—А—Г–њ–≤–∞—В —Г–Љ–Њ—А–∞ –љ–∞ –Љ–µ—В–∞–ї–∞, –Ї–Њ–µ—В–Њ –Ј–љ–∞—З–Є, —З–µ –љ–µ —Б–∞ –Њ—Б–Њ–±–µ–љ–Њ –њ–Њ–і—Е–Њ–і—П—Й–Є –Ј–∞ –≥–Њ–ї–µ–Љ–Є –љ–∞—В–Њ–≤–∞—А–≤–∞–љ–Є—П. –Ш–љ–ґ–µ–љ–µ—А–Є—В–µ —В—К—А—Б—П—В –ї–µ–Ї–Є –Є —В—А–∞–є–љ–Є –Љ–∞—В–µ—А–Є–∞–ї–Є –Њ—В —В–Є–њ–∞ –љ–∞ —В–Є—В–∞–љ–∞ –Є–ї–Є –≤—К–≥–ї–µ—А–Њ–і–љ–Є—В–µ –≤–ї–∞–Ї–љ–∞. –Ґ–µ –љ–µ–Є–Ј–±–µ–ґ–љ–Њ —Й–µ –±—К–і–∞—В —Б–Ї—К–њ–Є, –љ–Њ –Є —Й–µ –Њ—Б–Є–≥—Г—А—П—В –µ—Д–µ–Ї—В–Є–≤–љ–Њ—Б—В –љ–∞ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В–∞.
–Ю—Б–Њ–±–µ–љ –њ—А–Њ–±–ї–µ–Љ –њ—А–µ–і—Б—В–∞–≤–ї—П–≤–∞—В –њ—А–µ–і–∞–≤–Ї–Є—В–µ. –°—В–∞–љ–і–∞—А—В–љ–Є—В–µ —Е–Є–і—А–∞–≤–Є—З–љ–Є —Ж–Є–ї–Є–љ–і—А–Є —Б–∞ –і–Њ—Б—В–∞—В—К—З–љ–Њ –Љ–Њ—Й–љ–Є –Є –Љ–Њ–≥–∞—В –і–∞ —А–∞–±–Њ—В—П—В —Б –≤–Є—Б–Њ–Ї–∞ —В–Њ—З–љ–Њ—Б—В, –љ–Њ —Б–∞ –Є —В–µ–ґ–Ї–Є –Є —Б–∞ –љ–µ–Њ–±—Е–Њ–і–Є–Љ–Є –Љ–љ–Њ–≥–Њ —И–ї–∞–љ–≥–Њ–≤–µ –Є —В—А—К–±–Є. –Я–љ–µ–≤–Љ–∞—В–Є–Ї–∞—В–∞ вАУ –љ–∞–њ—А–Њ—В–Є–≤ вАУ –µ –Љ–љ–Њ–≥–Њ –љ–µ–њ—А–µ–і—Б–Ї–∞–Ј—Г–µ–Љ–∞ –≤ –Њ–±–ї–∞—Б—В—В–∞ –љ–∞ –Њ–±—А–∞–±–Њ—В–Ї–∞—В–∞ –љ–∞ –і–≤–Є–ґ–µ–љ–Є—П, —В—К–є –Ї–∞—В–Њ —Б–≥—К—Б—В–µ–љ–Є—П—В –≥–∞–Ј –њ—А—Г–ґ–Є–љ–Є—А–∞, –∞ —А–µ–∞–Ї—В–Є–≤–љ–Є—В–µ —Б–Є–ї–Є —Й–µ —А–∞–Ј–Љ–µ—Б—В–≤–∞—В –њ—А–µ–і–∞–≤–Ї–Є—В–µ –њ—А–Є –і–≤–Є–ґ–µ–љ–Є–µ –љ–∞ —Б–Ї–µ–ї–µ—В–∞.
–Т –Љ–Њ–Љ–µ–љ—В–∞ —Б–µ —А–∞–Ј—А–∞–±–Њ—В–≤–∞—В –љ–Њ–≤–Є —Б–µ—А–≤–Њ–њ—А–µ–і–∞–≤–Ї–Є –љ–∞ –µ–ї–µ–Ї—В—А–Њ–љ–љ–∞ –Њ—Б–љ–Њ–≤–∞, –Ї–Њ–Є—В–Њ —Й–µ –Є–Ј–њ–Њ–ї–Ј–≤–∞—В –Љ–∞–≥–љ–Є—В–Є –Є —Й–µ –Њ—Б–Є–≥—Г—А—П–≤–∞—В —А–µ–Ј–Ї–Є –і–≤–Є–ґ–µ–љ–Є—П, –њ–Њ—В—А–µ–±—П–≤–∞–є–Ї–Є –Љ–Є–љ–Є–Љ—Г–Љ –µ–љ–µ—А–≥–Є—П –Є –±–Є–і–µ–є–Ї–Є –Љ–∞–ї–Ї–Є. –Ь–Њ–ґ–µ –і–∞ —Б–µ —Б—А–∞–≤–љ–µ–љ–Є–µ —Б –њ—А–µ—Е–Њ–і–∞ –Њ—В –њ–∞—А–Њ—Е–Њ–і–љ–Њ –≤–Њ–Ј–Є–ї–Њ –Ї—К–Љ –≤–ї–∞–Ї. –°—К—Й–Њ —В–∞–Ї–∞ —В–∞–Ї—К–≤ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В —Й–µ –Є–Љ–∞ –≥—К–≤–Ї–∞–≤–Є —Б—В–∞–≤–Є. –Ґ–Њ–Ј–Є –њ—А–Њ–±–ї–µ–Љ –Љ–Њ–ґ–µ –і–∞ –±—К–і–µ —А–∞–Ј—А–µ—И–µ–љ –Є –Њ—В —А–∞–Ј—А–∞–±–Њ—В—З–Є—Ж–Є—В–µ –љ–∞ —Б–Ї–∞—Д–∞–љ–і—А–Є, –Ї–Њ–Є—В–Њ —Й–µ –њ–Њ–Љ–Њ–≥–љ–∞—В –Ј–∞ –∞–і–∞–њ—В–∞—Ж–Є—П—В–∞ –љ–∞ –Ї–Њ—Б—В—О–Љ–∞ –Ї—К–Љ —А–∞–Ј–Љ–µ—А–Є—В–µ –љ–∞ –љ–Њ—Б–Є—В–µ–ї—П –Љ—Г.
–Ф–≤–Є–ґ–µ–љ–Є–µ
–Э–µ –µ —В–Њ–ї–Ї–Њ–≤–∞ –ї–µ—Б–љ–Њ –і–∞ —Б–µ –Є–Ј—А–∞–±–Њ—В–Є –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В —Б –µ–і–љ–∞–Ї–≤–∞ —Б–Ї–Њ—А–Њ—Б—В –љ–∞ —А–µ–∞–Ї—Ж–Є–Є—В–µ –љ–∞ –≤—Б–µ–Ї–Є –Њ—В –Ї—А–∞–є–љ–Є—Ж–Є—В–µ. –Я—А–Є–љ—Ж–Є–њ—К—В –љ–∞ —А–∞–±–Њ—В–∞ –љ–∞ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В–∞ –µ –Ј–∞–Љ–Є—Б–ї–µ–љ —В–∞–Ї–∞: –њ–Њ—В—А–µ–±–Є—В–µ–ї—П—В –Є–Ј–≤—К—А—И–≤–∞ –љ—П–Ї–∞–Ї–≤–Њ –і–≤–Є–ґ–µ–љ–Є–µ —Б —А—К–Ї–∞ –Є–ї–Є –Ї—А–∞–Ї. –Ф–∞—В—З–Є—Ж–Є, —Б–≤—К—А–Ј–∞–љ–Є —Б –Ї—А–∞–є–љ–Є—Ж–Є—В–µ, –њ—А–µ–і–∞–≤–∞—В —В–Њ–≤–∞ –і–≤–Є–ґ–µ–љ–Є–µ –љ–∞ –Ј–∞–і–≤–Є–ґ–≤–∞—Й–Є—В–µ –Љ–µ—Е–∞–љ–Є–Ј–Љ–Є –љ–∞ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В–Њ–≤–Є—В–µ –Ї—А–∞–є–љ–Є—Ж–Є вАУ –±–Є–ї–Є —В–µ–Ј–Є –Љ–µ—Е–∞–љ–Є–Ј–Љ–Є —Е–Є–і—А–∞–≤–ї–Є—З–љ–Є –Є–ї–Є –µ–ї–µ–Ї—В—А–Є—З–µ—Б–Ї–Є. –Х–і–љ–Њ–≤—А–µ–Љ–µ–љ–љ–Њ —Б —В–Њ–≤–∞ –і–∞—В—З–Є—Ж–Є—В–µ —В—А—П–±–≤–∞ –і–∞ —Б–ї–µ–і—П—В –і–≤–Є–ґ–µ–љ–Є—П—В–∞ –љ–∞ –Љ–∞–љ–Є–њ—Г–ї–∞—В–Њ—А–Є—В–µ –і–∞ —Б—К–Њ—В–≤–µ—В—Б—В–≤–∞—В –љ–∞ —В–µ–Ј–Є –љ–∞ –Њ–њ–µ—А–∞—В–Њ—А–∞. –Ю—Б–≤–µ–љ –≤—К–њ—А–Њ—Б–∞ –Ј–∞ –∞–Љ–њ–ї–Є—В—Г–і–љ–∞—В–∞ —Б–Є–љ—Е—А–Њ–љ–Є–Ј–∞—Ж–Є—П –љ–∞ –і–≤–Є–ґ–µ–љ–Є—П—В–∞ –њ—А–µ–і –Є–љ–ґ–µ–љ–µ—А–Є—В–µ —Б—В–Њ–Є –Є —В–Њ–Ј–Є –Ј–∞ —В—П—Е–љ–Њ—В–Њ –≤—А–µ–Љ–µ–≤–Њ —Е–∞—А–Љ–Њ–љ–Є–Ј–Є—А–∞–љ–µ. –Э–Њ –њ—К–Ї —Б–њ–Њ—А–µ–і –љ—П–Ї–Њ–Є –Ї–Њ–љ—Б—В—А—Г–Ї—В–Њ—А–Є, –љ–µ —В—А—П–±–≤–∞ –Є –і–∞ —Б–µ –і–Њ–≤–µ—А–Є–Љ –љ–∞ –њ–Њ—В—А–µ–±–Є—В–µ–ї—П –Є –і–∞ –Њ—Б—В–∞–≤–Є–Љ –љ–∞ –і–∞—В—З–Є—Ж–Є –і–∞ –Њ–њ—А–µ–і–µ–ї—П—В –±—К—А–Ј–Є–љ–∞—В–∞ –љ–∞ –і–≤–Є–ґ–µ–љ–Є—П—В–∞ –њ–Њ —В–µ–Ј–Є –љ–∞ —В—П–ї–Њ—В–Њ.
–Х–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В—К—В —Б–µ –Ј–∞–Ї—А–µ–њ–≤–∞ –Ј–∞ —В—П–ї–Њ—В–Њ —З—А–µ–Ј —А–µ–Љ—К—Ж–Є –Є–ї–Є –Ї–∞–Є—И–Є. –Э–Њ —В–Њ–≤–∞ –Ј–∞–Ї—А–µ–њ–≤–∞–љ–µ –љ–µ –µ —Б—В–∞–±–Є–ї–љ–Њ –Є –њ–Њ–Ј–≤–Њ–ї—П–≤–∞ –љ–∞ —З–Њ–≤–µ–Ї–∞ –і–∞ –Є–Ј–≤—К—А—И–≤–∞ –Љ–∞–ї–Ї–Є –і–≤–Є–ґ–µ–љ–Є—П –≤—К–љ –Њ—В –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В–∞ - ,,–Љ–Є–Ї—А–Њ–њ—А–µ–Љ–µ—Б—В–≤–∞–љ–Є—ПвАЬ. –Я—А–Є —В–µ–Ј–Є –Љ–Є–Ї—А–Њ–њ–ї–µ–Љ–µ—Б—В–≤–∞–љ–Є—П —З–Њ–≤–µ–Ї –≤—К–Ј–і–µ–є—Б—В–≤–∞ –≤—К—А—Е—Г –і–∞—В—З–Є—Ж–Є –Ј–∞ –Љ—Г—Б–Ї—Г–ї–љ–Є —Г—Б–Є–ї–Є—П, –њ—А–Є–Ї—А–µ–њ–µ–љ–Є –Ї—К–Љ —В–∞–Ј–Є –Є–ї–Є –Њ–љ–∞–Ј–Є —З–∞—Б—В –љ–∞ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В–∞, —Б–Є–≥–љ–∞–ї–Є–Ј–Є—А–∞–є–Ї–Є —З—А–µ–Ј —В–Њ–≤–∞ –Ј–∞ –ґ–µ–ї–∞–љ–∞—В–∞ –њ–Њ—Б–Њ–Ї–∞ –Є —Б–Ї–Њ—А–Њ—Б—В –љ–∞ –њ—А–µ–Љ–µ—Б—В–≤–∞–љ–µ. –Э–∞ –Ї—А–∞–Ї–∞—В–∞ –љ–∞ –∞–њ–∞—А–∞—В–∞ —Б—К—Й–Њ —В–∞–Ї–∞ —Б–∞ –Љ–Њ–љ—В–Є—А–∞–љ–Є –і–∞—В—З–Є—Ж–Є –Ј–∞ —Г—Б–Є–ї–Є–µ.
–Ь–µ—Е–∞–љ–Є–Ј–Љ—К—В –љ–∞ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В–∞ –Љ–Њ–ґ–µ –і–∞ –±—К–і–µ —В–≤—К—А–і–µ –±—К—А–Ј –Ј–∞ –њ–Њ—В—А–µ–±–Є—В–µ–ї—П –Љ—Г, –∞ –і–∞ –±—К–і–µ –љ–∞–њ—А–∞–≤–µ–љ –њ—А–µ–Ї–∞–ї–µ–љ–Њ –±–∞–≤–µ–љ вАУ –љ–µ –µ –µ—Д–Є–Ї–∞—Б–љ–Њ. –Т—Б—П–Ї–∞ –Љ–µ—Е–∞–љ–Є–Ї–∞ –Є–Љ–∞ –Њ–њ—А–µ–і–µ–ї–µ–љ–Њ –≤—А–µ–Љ–µ –Ј–∞ —А–µ–∞–Ї—Ж–Є—П –Є –≤ —Б–ї—Г—З–∞—П —В–Њ —В—А—П–±–≤–∞ –і–∞ –±—К–і–µ –≤—К–Ј–Љ–Њ–ґ–љ–Њ –љ–∞–є-–Љ–∞–ї–Ї–Њ. –Т –Љ–Њ–Љ–µ–љ—В–∞ –њ—А–µ–і–Є–Љ—Б—В–≤–Њ –Є–Љ–∞—В —А–∞–Ј—А–∞–±–Њ—В–Ї–Є—В–µ –љ–∞ –љ–µ–≥–Њ–ї–µ–Љ–Є, –Ї–Њ–Љ–њ–∞–Ї—В–љ–Є –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В–Є. –Ґ—К–є –Ї–∞—В–Њ —В–µ –љ–µ –њ–Њ–Ј–≤–Њ–ї—П–≤–∞—В —Г–≤–µ–ї–Є—З–∞–≤–∞–љ–µ –љ–∞ –Њ–њ–Њ—А–љ–∞—В–∞ –њ–Њ–≤—К—А—Е–љ–Њ—Б—В –Є —В.–љ., —В–Њ –Љ–µ—Е–∞–љ–Є–Ї–∞, –Ї–Њ—П—В–Њ –љ–µ –Љ–Њ–ґ–µ –і–∞ —Б–µ –і–≤–Є–ґ–Є –Ј–∞–µ–і–љ–Њ —Б —З–Њ–≤–µ–Ї–∞, –Љ–Њ–ґ–µ –і–∞ —Б–µ –Њ–Ї–∞–ґ–µ —Б–µ—А–Є–Њ–Ј–љ–∞ –њ—А–µ—З–Ї–∞ –≤ –њ—А–∞–Ї—В–Є–Ї–∞—В–∞. –Ф–µ—Б–Є–љ—Е—А–Њ–љ–Є–Ј–Є—А–∞–љ–µ—В–Њ –љ–∞ –і–≤–Є–ґ–µ–љ–Є—П—В–∞ –љ–∞ –њ–Њ—В—А–µ–±–Є—В–µ–ї—П –Є –Ї–Њ—Б—В—О–Љ–∞ –Љ–Њ–ґ–µ –і–∞ –і–Њ–≤–µ–і–µ –і–Њ –љ–∞—А–∞–љ—П–≤–∞–љ–µ –Є–ї–Є –њ–∞–і–∞–љ–µ. –Э—Г–ґ–љ–Њ –µ –і–∞ —Б–µ –Њ–≥—А–∞–љ–Є—З–∞–≤–∞ –±—К—А–Ј–Є–љ–∞—В–∞ –љ–∞ —А–µ–∞–Ї—Ж–Є–Є—В–µ –Є –љ–∞ –і–≤–µ—В–µ —Б—В—А–∞–љ–Є. –°—К—Й–Њ —В–∞–Ї–∞ вАУ –Њ—В—А–∞–љ–Њ –і–∞ —Б–µ –њ—А–µ–і—Г—Б–µ—В–Є –љ–µ–њ—А–µ–і–љ–∞–Љ–µ—А–µ–љ–Њ –Є–ї–Є –љ–µ–ґ–µ–ї–∞—В–µ–ї–љ–Њ –і–≤–Є–ґ–µ–љ–Є–µ, –∞ –љ–µ –Ї–Є—Е–∞–љ–µ –Є–ї–Є –њ–Њ–Ї–∞—И–ї—П–љ–µ –љ–∞ –і–Њ–≤–µ–і–µ –і–Њ —Г—Б–Ї–Њ—А—П–≤–∞–љ–µ –љ–∞ —А–µ–∞–Ї—Ж–Є–Є—В–µ. –Х–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В—К—В –њ–Њ–љ–∞—З–∞–ї–Њ —Ж–µ–ї–Є —А–∞–≤–љ–Њ–Љ–µ—А–љ–Њ, –њ—А–Њ–њ–Њ—А—Ж–Є–Њ–љ–∞–ї–љ–Њ —Г–≤–µ–ї–Є—З–∞–≤–∞–љ–µ –љ–∞ —Г—Б–Є–ї–Є—П—В–∞ –љ–∞ –њ–Њ—В—А–µ–±–Є—В–µ–ї—П –њ—А–Є –≤—Б–Є—З–Ї–Є –љ–µ–≥–Њ–≤–Є –і–≤–Є–ґ–µ–љ–Є—П.
–Х–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В–Є—В–µ –≤ –Љ–Њ–Љ–µ–љ—В–∞
–Я—А–Њ–≥—А–∞–Љ–∞—В–∞ Warrior Web, —А–∞–Ј—А–∞–±–Њ—В–µ–љ–∞ –Њ—В –Я–µ–љ—В–∞–≥–Њ–љ–∞, –µ —Б —З–Є—Б—В–Њ –≤–Њ–µ–љ–љ–Њ –њ—А–µ–і–љ–∞–Ј–љ–∞—З–µ–љ–Є–µ –Є —В—А—П–±–≤–∞ –і–∞ —Г–≤–µ–ї–Є—З–Є –Є–Ј–і—А—К–ґ–ї–Є–≤–Њ—Б—В—В–∞ –љ–∞ –≤–Њ–є–љ–Є—Ж–Є—В–µ. –Ґ—П —В—А—П–±–≤–∞ –і–∞ —А–∞–Ј–њ—А–µ–і–µ–ї—П –љ–∞—В–Њ–≤–∞—А–≤–∞–љ–µ—В–Њ –њ—А–Є —Г—Б–Ї–Њ—А–µ–љ —Е–Њ–і, –∞ –Є –і–∞ –Ј–∞—Й–Є—В–∞–≤–∞ —З–Њ–≤–µ–Ї–∞ –Њ—В –љ–∞—А–∞–љ—П–≤–∞–љ–µ. –У–ї–∞–≤–љ–Њ—В–Њ –њ—А–µ–Є–Љ—Г—Й–µ—Б—В–≤–Њ –љ–∞ Warrior Web –µ, —З–µ –≤–Њ–є–љ–Є–Ї—К—В –Љ–Њ–ґ–µ –і–∞ –љ–Њ—Б–Є —В–∞–Ї–Њ–≤–∞ –Є–Ј–і–µ–ї–Є–µ –њ–Њ–і –Њ–±–Є–Ї–љ–Њ–≤–µ–љ–∞ —Г–љ–Є—Д–Њ—А–Љ–∞. –Ъ–Њ–Љ–њ–ї–µ–Ї—В—К—В –µ –Њ–±–Њ—А—Г–і–≤–∞–љ —Б –µ–ї–µ–Ї—В—А–Є—З–µ—Б–Ї–Є —Г—Б–Є–ї–≤–∞—В–µ–ї–Є –љ–∞ –Љ—Г—Б–Ї—Г–ї–љ–∞—В–∞ —Б–Є–ї–∞, –Ї–Њ–Є—В–Њ —Б–µ –Ј–∞—Е—А–∞–љ–≤–∞—В –Њ—В –∞–Ї—Г–Љ—Г–ї–∞—В–Њ—А–љ–Є –±–∞—В–µ—А–Є–Є. –°—К—Й–Њ —В–∞–Ї–∞ —Б–µ —Б—К–і—К—А–ґ–∞ –Є GPS —Б–Є—Б—В–µ–Љ–∞, –Ј–∞ –і–∞ –Љ–Њ–ґ–µ –≤–Њ–є–љ–Є–Ї—К—В –і–∞ –Љ–Њ–ґ–µ –і–∞ –±—К–і–µ –Њ—В–Ї—А–Є—В –Є –і–∞ –Љ—Г —Б–µ –Њ–Ї–∞–ґ–µ –Љ–µ–і–Є—Ж–Є–љ—Б–Ї–∞ –њ–Њ–Љ–Њ—Й. –Э–∞–є-–њ–ї—К—В–љ–Њ –Њ–±–≥—К—А–љ–∞—В–Є—В–µ –Љ–µ—Б—В–∞ –љ–∞ —В—П–ї–Њ—В–Њ —Й–µ –±—К–і–∞—В –Ї–Њ–ї–µ–љ–љ–Є—В–µ —Б—В–∞–≤–Є –Є –≥–ї–µ–Ј–µ–љ–Є—В–µ, –Ј–∞ –і–∞ –Љ–Њ–ґ–µ –љ–µ —Б–∞–Љ–Њ –љ–∞—В–Њ–≤–∞—А–≤–∞–љ–µ—В–Њ –і–∞ –±—К–і–µ –і–Њ–±—А–µ —А–∞–Ј–њ—А–µ–і–µ–ї–µ–љ–Њ, –љ–Њ –Є –≤–Њ–є–љ–Є—Ж–Є—В–µ –љ–µ —Б–∞–Љ–Њ –і–∞ –±—К–і–∞—В –Ј–∞—Й–Є—В–µ–љ–Є –Њ—В —В—А–∞–≤–Љ–Є –Є —А–∞–Ј—В–µ–ґ–µ–љ–Є—П.

–Э—П–Ї–Њ–ї–Ї–Њ –Њ–±—А–∞–Ј–µ—Ж–∞ –Њ—В —В–∞–Ї–∞–≤–∞ —Г–љ–Є—Д–Њ—А–Љ–∞ –љ–µ–Њ—В–і–∞–≤–љ–∞ –±—П—Е–∞ –њ–Њ–Ї–∞–Ј–∞–љ–Є. –Ґ–µ —Б–∞ —Б–љ–∞–±–і–µ–љ–Є —Б –Љ–љ–Њ–≥–Њ –і–∞—В—З–Є—Ж–Є, –Њ—В—З–Є—В–∞—Й–Є –њ–Њ–Ї–∞–Ј–∞–љ–Є—П –Ј–∞ –Љ—Г—Б–Ї—Г–ї–љ–Є—В–µ —Б—В—П–≥–∞–љ–Є—П, –њ–Њ—В—А–µ–±–ї–µ–љ–Є–µ—В–Њ –љ–∞ –Ї–Є—Б–ї–Њ—А–Њ–і –Є –≤—К–Њ–±—Й–µ —В–µ–ї–µ—Б–љ–Є—П –±–∞–ї–∞–љ—Б –љ–∞ –њ–Њ—В—А–µ–±–Є—В–µ–ї—П.
–•1 –µ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В –Ј–∞ –∞—Б—В—А–Њ–љ–∞–≤—В–Є –Є —Е–Њ—А–∞ —Б –і–Є—Б—Д—Г–љ–Ї—Ж–Є–Є –≤ –Ї—А–∞–Ї–∞—В–∞. –Ґ–µ–ґ–Є 25 –Ї–≥ –Є –µ —Б—К–Ј–і–∞–і–µ–љ –≤ –Э–Р–°–Р. –Я—А–Є –љ–µ–≥–Њ —Б–∞ –Є–Ј–њ–Њ–ї–Ј–≤–∞–љ–Є –љ—П–Ї–Њ–Є —В–µ—Е–љ–Њ–ї–Њ–≥–Є—З–љ–Є —А–µ—И–µ–љ–Є—П –Њ—В –Ї–Њ—Б–Љ–Є—З–µ—Б–Ї–Є—П —А–Њ–±–Њ—В Robonaut 2. –Т –Ъ–Њ—Б–Љ–Њ—Б–∞ –•1 –Љ–Њ–ґ–µ –і–∞ –њ–Њ–Љ–Њ–≥–љ–µ –љ–∞ –∞—Б—В—А–Њ–љ–∞–≤—В–Є—В–µ –і–∞ —Б–µ –њ—А–Є–і–≤–Є–ґ–∞—В, –љ–µ —Г–њ–Њ—В—А–µ–±—П–≤–∞–є–Ї–Є –њ—А–µ–Ї–∞–ї–µ–љ–Њ –Љ–љ–Њ–≥–Њ —Б–Є–ї–Є –≤ —Г—Б–ї–Њ–≤–Є—П—В–∞ –љ–∞ –≥—А–∞–≤–Є—В–∞—Ж–Є—П, –љ—П–Ї–Њ–ї–Ї–Њ –њ—К—В–Є –њ–Њ-–≥–Њ–ї—П–Љ–∞ –Њ—В –Ј–µ–Љ–љ–∞—В–∞. –Ю—Б–Є–≥—Г—А—П–≤–∞ –Є –љ–∞—В–Њ–≤–∞—А–≤–∞–љ–µ –љ–∞ –Љ—Г—Б–Ї—Г–ї–Є—В–µ –Ј–∞ –∞—Б—В—А–Њ–љ–∞–≤—В–Є—В–µ, –љ–∞–Љ–Є—А–∞—Й–Є —Б–µ –≤ –±–µ–Ј—В–µ–≥–ї–Њ–≤–љ–Њ—Б—В. –Т—Б–µ–Ї–Є –Ї—А–∞–є–љ–Є–Ї –љ–∞ –•1 –Є–Љ–∞ –і–µ—Б–µ—В–Ї–Є –њ–Њ–і–≤–Є–ґ–љ–Є —Б—В–∞–≤–Є, –љ–∞ —З–µ—В–Є—А–Є –Њ—В –Ї–Њ–Є—В–Њ —Б–∞ –Љ–Њ–љ—В–Є—А–∞–љ–Є –µ–ї–µ–Ї—В—А–Њ–і–≤–Є–≥–∞—В–µ–ї–Є. –Ґ–∞–Ї–∞ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В—К—В –њ–Њ–≤—В–∞—А—П –і–≤–Є–ґ–µ–љ–Є—П—В–∞ –љ–∞ —З–Њ–≤–µ—И–Ї–Є—В–µ –Ї—А–∞–Ї–∞.

RAYTHEON –±–µ—И–µ –і–µ–Љ–Њ–љ—Б—В—А–Є—А–∞–љ –њ—А–µ–Ј 2010 –≥., –∞ –Љ–Њ–і–Є—Д–Є–Ї–∞—Ж–Є—П—В–∞ –Љ—Г XOS 2 –µ –і–Њ—Б—В–∞ –њ–Њ-–≥—К–≤–Ї–∞–≤–∞ –Є –ї–µ–Ї–∞. –Э—П–Љ–∞ –љ–Є—В–Њ —А–µ–∞–Ї—В–Њ—А, –љ–Є—В–Њ –±—А–Њ–љ—П. –Ч–љ–∞—З–Є—В–µ–ї–љ–Њ –њ–Њ–≤–Є—И–∞–≤–∞ —В–µ–≥–ї–Њ–љ–Њ—Б–Є–Љ–Њ—Б—В—В–∞ –љ–∞ —З–Њ–≤–µ–Ї–∞.

–°—К—Й–µ—Б—В–≤—Г–≤–∞—В –Є –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В–Є, —А–∞–±–Њ—В–µ—Й–Є –њ–Њ–і Windows. Rewalk, —Б—К–Ј–і–∞–і–µ–љ –Ј–∞ —Е–Њ—А–∞ —Б –Њ–≥—А–∞–љ–Є—З–µ–љ–Є –і–≤–Є–≥–∞—В–µ–ї–љ–Є –≤—К–Ј–Љ–Њ–ґ–љ–Њ—Б—В–Є, —В–µ–ґ–Є 23,3 –Ї–≥ –Є –Є–Љ–∞ —В—А–Є —А–µ–ґ–Є–Љ–∞: —Е–Њ–і–µ–љ–µ, —Б–µ–і–µ–љ–µ –Є –њ—А–∞–≤–Њ—Б—В–Њ—П—Й.
HULC (Human Universal Load Carrier) –µ —Б—К—Й–Њ —В–∞–Ї–∞ –њ—А–µ–і–љ–∞–Ј–љ–∞—З–µ–љ –Ј–∞ –≤–Њ–µ–љ–љ–Є —Ж–µ–ї–Є. –Ч–∞–і–≤–Є–ґ–≤–∞–љ–µ—В–Њ –љ–∞ –Ї—А–∞–є–љ–Є—Ж–Є—В–µ –µ —Е–Є–і—А–∞–≤–ї–Є—З–љ–Њ, –∞ —Б–µ –Ј–∞—Е—А–∞–љ–≤–∞ –Њ—В –ї–Є—В–Є–µ–≤–Њ-–њ–Њ–ї–Є–Љ–µ—А–љ–Є –±–∞—В–µ—А–Є–Є. –Я–Њ—В—А–µ–±–Є—В–µ–ї—П—В –Љ–Њ–ґ–µ –і–∞ –љ–Њ—Б–Є –і–Њ 140 –Ї–≥ —В–Њ–≤–∞—А.

–Э–∞–є-–Њ—З–∞–Ї–≤–∞–љ–Њ—В–Њ –љ–Њ–≤–Њ–≤—К–≤–µ–і–µ–љ–Є–µ –≤ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В–Є—В–µ —Б–∞ —А–Њ–±–Њ—В–Є–Ј–Є—А–∞–љ–Є—В–µ —А—К–Ї–∞–≤–Є—Ж–Є. –Ґ–Њ–≤–∞ —Б–∞ –Љ–∞–љ–Є–њ—Г–ї–∞—В–Њ—А–Є –Ј–∞ –Є–Ј–њ–Њ–ї–Ј–≤–∞–љ–µ –љ–∞ –Њ–±–µ–Ї—В–Є –Є –Є–љ—Б—В—А—Г–Љ–µ–љ—В–Є, –љ–µ —В–Њ–ї–Ї–Њ–≤–∞ —Г–і–Њ–±–љ–Є –Ј–∞ —А—К—З–љ–Њ –Ј–∞—Е–≤–∞—Й–∞–љ–µ. –Я—А–Є —В–µ–Ј–Є ,,—А—К–Ї–∞–≤–Є—Ж–ЄвАЬ –њ—А–Њ–±–ї–µ–Љ—К—В —Б—К—Б —Б–Є–љ—Е—А–Њ–љ–Є–Ј–∞—Ж–Є—П—В–∞ —Б–µ —Г—Б–ї–Њ–ґ–љ—П–≤–∞ –Њ—В –њ–Њ-–≥–Њ–ї–µ–Љ–Є—П –±—А–Њ–є –Љ–µ—Е–∞–љ–Є—З–љ–Є –µ–ї–µ–Љ–µ–љ—В–Є, –Њ—Б–Њ–±–µ–љ–Њ—Б—В–Є—В–µ –љ–∞ –і–≤–Є–≥–µ–љ–Є–µ –љ–∞ —З–Њ–≤–µ—И–Ї–Є—В–µ –Ї–Є—В–Ї–Є –Є –і—А.
–°–ї–µ–і–≤–∞—Й–Є—П—В –µ—В–∞–њ –≤ –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В–Є—В–µ –≤–µ—А–Њ—П—В–љ–Њ —Й–µ –±—К–і–µ –љ–µ–≤—А–Њ–µ–ї–µ–Ї—В—А–Њ–љ–љ–Є—П—В –Є–љ—В–µ—А—Д–µ–є—Б. –°–µ–≥–∞ —Г–њ—А–∞–≤–ї–µ–љ–Є—В–Њ –љ–∞ –Љ–µ—Е–∞–љ–Є–Ї–∞—В–∞ —Б–µ –Њ—Б—К—Й–µ—Б—В–≤—П–≤–∞ —З—А–µ–Ј –і–∞—В—З–Є—Ж–Є –Є –њ—А–µ–і–∞–≤–Ї–Є. –Я–Њ-—Г–і–Њ–±–љ–Є –Ј–∞ —Г–њ–Њ—В—А–µ–±–∞ —Б–∞ –µ–ї–µ–Ї—В—А–Њ–і–Є, —З—Г–≤—Б—В–≤–Є—В–µ–ї–љ–Є –Ї—К–Љ –љ–µ—А–≤–љ–Є—В–µ –Є–Љ–њ—Г–ї—Б–Є –љ–∞ —З–Њ–≤–µ–Ї–∞. –Ґ–∞–Ї–∞–≤–∞ —Б–Є—Б—В–µ–Љ–∞ —Й–µ —Б–љ–Є–ґ–Є –≤—А–µ–Љ–µ—В–Њ –Ј–∞ —А–µ–∞–Ї—Ж–Є—П –љ–∞ –Њ—А–≥–∞–љ–Є–Ј–Љ–∞ –Є —Й–µ –њ–Њ–≤–Є—И–Є –µ—Д–µ–Ї—В–Є–≤–љ–Њ—Б—В—В–∞ –љ–∞ —Ж–µ–ї–Є—П –µ–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В.
–Р–љ—В–Њ–љ –Ю—А—Г—И, Sandacite.bg
–Ш–Ј—В–Њ—З–љ–Є—Ж–Є:
DARPA's Warrior Web augments carrying capacity and endurance
Retro-Engineering: Photos of 1967 General Electric 'Hardiman' Electric Exoskeleton
–Ц–µ–ї–µ–Ј–љ—Л–є –І–µ–ї–Њ–≤–µ–Ї: –љ–∞—Б—В–Њ—П—Й–µ–µ –Є –±—Г–і—Г—Й–µ–µ —Н–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В–Њ–≤
–І—В–Њ —Б–Њ–±–Њ–є –њ—А–µ–і—Б—В–∞–≤–ї—П–µ—В —Н–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В
–≠–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В: –±—Г–і—Г—Й–µ–µ, –Ї–Њ—В–Њ—А–Њ–µ —Г–ґ–µ –љ–∞—Б—В—Г–њ–Є–ї–Њ
–≠–Ї–Ј–Њ—Б–Ї–µ–ї–µ—В: –Ї–Њ–љ—Б—В—А—Г–Ї—Ж–Є—П, —Г–њ—А–∞–≤–ї–µ–љ–Є–µ
–Ю—Й–µ –њ–Њ —В–µ–Љ–∞—В–∞

–§–Є–Ј–Є–Ї–∞
–†–∞–Ї–µ—В–∞—В–∞ –Т–∞—Б–µ—А—Д–∞–ї - –њ—А–Њ–њ—Г—Б–љ–∞—В–Є—П—В —И–∞–љ—Б –љ–∞ –•–Є—В–ї–µ—А?

–Ґ–µ—Е–љ–Њ–ї–Њ–≥–Є–Є
–Х–ї–µ–Ї—В—А–Њ–љ–љ–∞—В–∞ –і–ї–∞–љ –Є –ї–∞–Љ–њ–Њ–≤–Њ—В–Њ —Г—Е–Њ

–Ґ–µ—Е–љ–Њ–ї–Њ–≥–Є–Є
–Э–∞ –њ—К—В –Ї—К–Љ –Љ–Њ–ї–µ–Ї—Г–ї–µ–љ –Ї–Њ–Љ–њ—О—В—К—А















")


–Ъ–Њ–Љ–µ–љ—В–∞—А–Є
–Ь–Њ–ї—П, —А–µ–≥–Є—Б—В—А–Є—А–∞–є—В–µ —Б–µ –Њ—В T–£–Ъ!
–Р–Ї–Њ –≤–µ—З–µ –Є–Љ–∞—В–µ —А–µ–≥–Є—Б—В—А–∞—Ж–Є—П, –љ–∞—В–Є—Б–љ–µ—В–µ –Ґ–£–Ъ!
–Э—П–Љ–∞ –Ї–Њ–Љ–µ–љ—В–∞—А–Є –Ї—К–Љ —В–∞–Ј–Є –љ–Њ–≤–Є–љ–∞ !
–Я–Њ—Б–ї–µ–і–љ–Є –Ї–Њ–Љ–µ–љ—В–∞—А–Є
Bai Tanas
–Ч–∞—Й–Њ –±–∞–Љ—П—В–∞ –µ —В–Њ–ї–Ї–Њ–≤–∞ —Б–ї—Г–Ј–µ—Б—В–∞?
–С–Њ—В–Њ–Ї—Б–Я—Г—В—О
–Т —Б–Ї–∞–ї–љ–∞ —Д–Њ—А–Љ–∞—Ж–Є—П –љ–∞ –Ь–∞—А—Б –µ –Њ—В–Ї—А–Є—В –Њ—А–≥–∞–љ–Є—З–µ–љ –≤—К–≥–ї–µ—А–Њ–і
–Я—А–Њ—Б—В –І–Њ–≤–µ–Ї
–Ъ–Њ–ї–Ї–Њ –±—К—А–Ј–Њ —Б—В–∞–≤–∞ –Ї–≤–∞–љ—В–Њ–≤–Њ—В–Њ –≤–њ–ї–Є—В–∞–љ–µ? –£—З–µ–љ–Є –≥–Њ –Є–Ј—Б–ї–µ–і–≤–∞—В –≤ –∞—В–Њ—Б–µ–Ї—Г–љ–і–µ–љ –Љ–∞—Й–∞–±
–Я—А–Њ—Б—В –І–Њ–≤–µ–Ї
–Ъ–Њ–ї–Ї–Њ –±—К—А–Ј–Њ —Б—В–∞–≤–∞ –Ї–≤–∞–љ—В–Њ–≤–Њ—В–Њ –≤–њ–ї–Є—В–∞–љ–µ? –£—З–µ–љ–Є –≥–Њ –Є–Ј—Б–ї–µ–і–≤–∞—В –≤ –∞—В–Њ—Б–µ–Ї—Г–љ–і–µ–љ –Љ–∞—Й–∞–±